VELOCE ヴェローチェ ブレーキローター CS12 リア 左右セット TOYOTA トヨタ アベンシス AZT250/AZT251/AZT255 03/7〜11/09 3151325
(税込) 送料込み
商品の説明
商品情報
■適合車両
23712円VELOCE ヴェローチェ ブレーキローター CS12 リア 左右セット TOYOTA トヨタ アベンシス AZT250/AZT251/AZT255 03/7〜11/09 3151325車、バイク、自転車自動車VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
・車名:TOYOTA アベンシス
・型式:AZT250/AZT251/AZT255
・年式:03/7〜11/09
■商品情報
・商品分類:ブレーキローター/ディスクローター
・メーカー:VELOCE RACING(ヴェローチェレーシング)
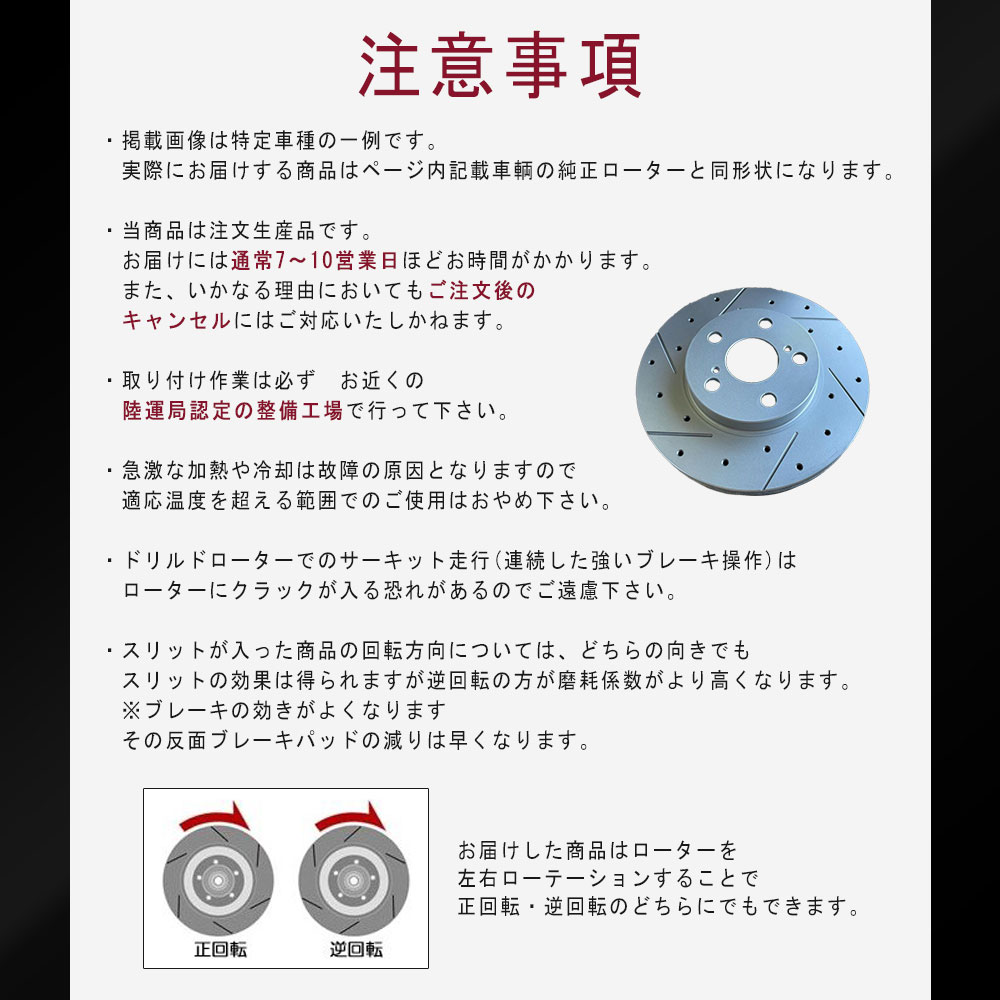
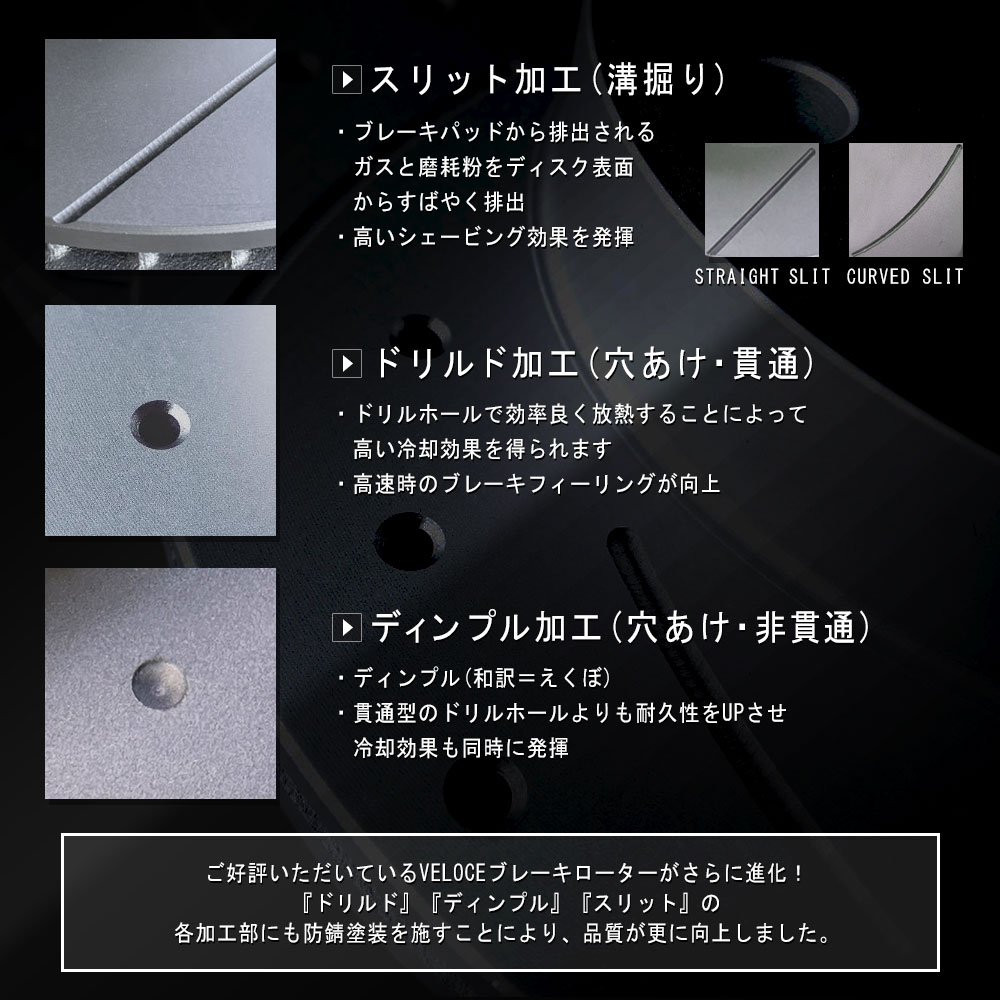
・パターン:12本スリット(カーブ)
・区分:リア左右2枚セット
・品番:3151325 CS12楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター
楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター
楽天市場】VELOCE RACING ベローチェレーシング ブレーキローター
楽天市場】VELOCE ヴェローチェ ブレーキローター スリット フロント
楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター S6
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039 : ysveloces6d3pfr11-0002 : オートサポートグループ - 通販 - Yahoo!ショッピング
Amazon | VELOCE RACING ブレーキローター リア 左右セット TOYOTA対応
楽天市場】VELOCE RACING ベローチェレーシング ブレーキローター
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター
VELOCE ヴェローチェ ブレーキローター S12 フロント 左右セット
VELOCE ヴェローチェ ブレーキローター S12 フロント 左右セット
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
VELOCE ヴェローチェ ブレーキローター S12 フロント 左右セット
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
楽天市場】VELOCE RACING ベローチェレーシング ブレーキローター
VELOCE ヴェローチェ ブレーキローター S12 フロント 左右セット
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
VELOCE ヴェローチェ ブレーキローター S6D3P フロント 左右セット TOYOTA トヨタ 86 ZN6 12/04〜 3617039
楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター
オートヴェローチェ AutoVeloce |BodyKIT
アベンシス 車用 ブレーキローターの人気商品・通販・価格比較 - 価格.com
オートヴェローチェ AutoVeloce |BodyKIT
楽天市場】VELOCE RACING ヴェローチェレーシング ブレーキローター
VELOCE ヴェローチェ ブレーキローター S12 フロント 左右セット
ブレーキディスクローターからバイクパーツ・バイク用品を探す(1
総代理店 ホンダ カワサキ用 バイク 汎用 ツインスタック



























商品の情報
メルカリ安心への取り組み
お金は事務局に支払われ、評価後に振り込まれます
出品者
スピード発送
この出品者は平均24時間以内に発送しています
